
Emergency Beacon Evaluation
Background Information
| | 406 MHz GPS Enabled Emergency Beacon Evaluation Background Information |
- Field Test Development, Conduct, and Methodology
- How the COSPAS-SARSAT System Works
- Advantages of Location Protocol ("Self-Locating" or "GPS-enabled") Beacons
- How GPS Works and GPS Limitations
- Accuracy Limitations of GPS in Location Protocol Beacons
- EPIRB vs. PLB - What are the differences?
- External vs. Integral GPS - What difference does it make?
- Manufacturers' Sales Materials and Brochures for Beacons Tested
(4 MB PDF download - Opens a new browser window)- Key West Location Protocol Beacon Test Report submitted to COSPAS-SARSAT
(PDF format - Opens a new browser window)- U.S. Coast Guard Fastfind Test Plan and Report
(PDF format - Opens a new browser window)
Get Free Acrobat
(PDF file) Reader- Additional Related Resources on Equipped To Survive™
It was initially the intention of the organizers to field test the beacons the week of December 15, 2003, immediately following conclusion of the week of laboratory testing. Difficulties coming to an understanding with NOAA for cooperation in the field testing resulted in postponement until January. A primary area of contention was that NOAA insisted that the beacons be test protocol coded. The operational portion of the COSPAS-SARSAT system ignores test protocol beacons for the most part, so there is no adverse impact on the system and there is no need for complicated interaction between various national SAR agencies to prevent any test alerts from inadvertently being treated as a real alert.
The sequestered off-the-shelf beacons could only be recoded by the manufacturer. This meant that it was necessary to gain manufacturer cooperation in order to test their beacons, giving a manufacturer de facto veto power over any testing conducted and allowing the manufacture to interface with the off-the-shelf beacons, potentially allowing tampering with the devices.
Customary consumer product testing protocol is to not alter the tested products in any manner, nor to allow manufacturers access to the products prior to testing, all to ensure that the products tested are the same as those consumers can themselves purchase. This is central to the entire concept of consumer product testing and deriving credible results from it. NOAA declined to cooperate if we did not use test protocol coded beacons, and noted the possibility of potentially ruinous FCC sanctions against the organizers if we used operationally coded beacons.
Heretofore this had not been an issue because: 1) the manufacturer has supplied the beacons to be tested and they are thus test protocol coded, as was the case in the Key West Test; 2) the quantities of beacons tested is so few as to not present a problem for NOAA; or 3) NOAA or another government agency is performing the testing.
Subsequently, as a result of our activities and queries related to developing this evaluation, NOAA has determined that there is no provision in U.S. regulations to accommodate active consumer testing of 406 MHz beacons without prior special approval of the FCC. This is a time-consuming process, at best; fraught with bureaucratic potholes. Even the use of test protocol coded beacons is not accommodated by the regulations. As a result, we were also forced to find a government sponsor to cooperate, neither NOAA or the Coast Guard being willing to do so. This requirement was eventually fulfilled with recruitment and participation in the evaluation of the Protection and Survival Laboratory at the FAA Civil Aerospace Medical Institute.
Recoding of the beacons is accomplished via an infrared link hooked to a personal computer, and nominally does not involve any disassembly of the beacon. ACR was willing to send a computer and link with its representative and to do the recoding at the field test site with witnesses present, and did so do during the field test.
McMurdo declined to do the recoding on site, citing as their primary reason security concerns revolving around their proprietary software. McMurdo insisted that the recoding to test protocol could be done only at their factory in the U.K. This presented numerous difficulties, including how to maintain the chain of custody and the considerable expense involved in shipping the beacons and sending a representative to the U.K. for the recoding process.
Peter Forey of Sartech Engineering Ltd. in the U.K., who had already donated use of test sets for the field tests was approached and readily agreed to oversee the recoding in the U.K. Shipping the beacons presented a variety of logistical challenges, as well as considerable expense. The McMurdo beacons are considered HAZMAT due to the lithium batteries and West Marine has a corporate policy of not shipping Dangerous Goods via air due to the financial liability it presents. Ritter flew to West Marine headquarters in Watsonville, California, to pack and ship the beacons.
On January 7, 2004, Forey took the beacons to McMurdo and witnessed the recoding process, taking digital photos of the activities and reporting on the process via email, noting that "the beacons were not opened, and the reprogramming was done via the infrared port using an engineering version of the same software we use for programming here. The EPIRBs were tested live in a screened box with GPS data input from a repeater. They were tested for power, frequency, data content, and GPS lock. It was decided just to do a message read on the PLBs, as a full test would have required deployment and restowing of the antennas."
McMurdo repackaged the beacons in new boxes, and Forey then shipped the beacons back to the Foundation in care of West Marine via FedEx, having to again comply with all Dangerous Goods shipping requirements, at the Foundation's expense.
Multiple beacons were required of each model to ensure that each test beacon started on equal terms, from what is known as a "cold start." This is based on the assumption that the beacon will likely not have been activated prior to use and thus will have no GPS information, ephemeris data or the almanac, in memory, which could possibly shorten the time to acquiring a location. Manufacturers claim that their beacons do not retain this data after being shut off, but as there is no way for us to independently confirm this, and there are technically ways in which it could be accomplished even with no power, the only way to ensure a cold start is to use a fresh, un-activated beacon for each test.
Note that while this is not an issue for the external GPS beacons, it was determined that fairness dictated that a fresh beacon be used for each test for these beacons as well. There was no practical way to arrange for the handheld Garmin eTrex GPS to be operated from a cold start for each test of the external GPS beacons. Timing for these beacons began with the activation of the GPS first, but as it was always a warm start, the location acquisition time when satellites were in view was minimal. For typical use of PLBs this would be a relatively likely scenario, as the GPS would be expected to have been used for navigation within a short period of time of its use to interface with the beacon. For external GPS EPIRBs mounted on a boat and permanently interfaced with the boat's GPS this would not be a factor at all.
For circumstances where this is not the case, for example when a GPS and external GPS EPIRB or PLB are stored in an abandon-ship bag, it can be expected that additional time will be required until location acquisition, the actual amount being dependent upon the GPS receiver's speed to acquisition from a cold start. Typically, this can vary from 4 to10 minutes, in the author's experience. This can be determined more precisely by experimentation or by reference to the GPS manufacturer's literature or published independent tests and this time should be used to derive a time to beacon location transmission from a cold start. In the case of the Garmin eTrex Legend reference GPS used in this evaluation, this would add "up to 5 minutes," according to the manufacturer's literature.
The field testing was conducted in and around Santa Cruz, California, USA. The maritime testing was conducted in Monterey Bay. Potential terrestrial test sites were reconnoitered, with assistance from West Marine, weeks ahead of the originally scheduled December 2003 test dates during a visit to West Marine by Ritter. GPS reception at the various test locations was determined using the reference Garmin eTrex Legend portable handheld GPS receiver and additional GPS receivers that would be used during the actual testing. Specific sites were then selected that met the criteria established for the various test scenarios.
On the Saturday prior to commencing the field tests, Ritter, ETS Foundation volunteers, and a West Marine representative met at West Marine's facility in Watsonville, California, USA. The boxes of sequestered ACR beacons from West Marine stock and the McMurdo beacons received back from Forey were retrieved from storage, along with the beacons received the week prior from Techtest.
Beacons were unpacked, randomly selected, and assigned to a particular test scenario. Each beacon was then labeled with its assigned scenario for quick identification at the test site. Each Beacon I.D., manufacturer, model, and assigned scenario was recorded on Data Sheets that would be used to manually record data during each scenario, as well as on a master list.
All Data Sheets were laser printed on Rite-In-The-Rain brand waterproof paper and were filled out with indelible ink due to the wet conditions that might be experienced during the testing. After this, each beacon was placed into a locked bin.
In order to ensure commonality of all the data recorded, all time data was recorded as UTC (Universal Coordinated Time, still commonly referred to as GMT, Greenwich Mean Time) with time synchronized using the time supplied from the GPS receivers.
Multiple sources for receiving and recording locally the 406 MHz beacon transmissions were used in order to ensure back-up capability.
Sartech Engineering Ltd. (UK) provided two model TSR406 406 MHz receivers. These each included an antenna with attached coaxial lead, 12-volt power cord, and a cord to connect to a computer. There was no recording or interpretive program provided, the receivers simply output via a serial cable the 30-character hexadecimal code the beacon was transmitting.
Bob Dubner of Dubner International wrote a data acquisition program that took the serial output from the receiver and translated it into plain English so that the Beacon ID and any GPS-derived location information transmitted could be read. This was displayed in real time on the computer display upon receipt of each data burst from a beacon, and was saved to diskette and to the hard drive. Also saved with this information was a date and time stamp from the computer, operator-inputted scenario information and any added comments.
Because the computers' batteries would not last for an entire day of testing, a man-portable ultralight Honda EU1000i Generator/Inverter was purchased. This provided both 120-volt power for the computers and 12-volt power for the Sartech receivers. Both 120- and 12-volt outlets were also used to charge camera batteries.
WS Technologies, Inc. (Canada) provided two Model BT100A 406 Beacon Testers. These were prototype units that provided essentially all the functionality, as well as added data parameters, of the aforementioned Sartech receivers and computers together, integrated into a handheld Dell Personal Digital Assistant. The built-in antenna had a range of 10 meters. One unit could be fitted with a remote antenna with a range of approximately 50 meters. These units recorded data on Secure Digital memory cards and this data was then later transferred to a computer. Each data burst resulted in an HTML page of formatted data, saved with its date and time stamp. File names were coded to provide scenario, manufacturer, and model of the beacon and receiver I.D. Dubner wrote a program that extracted the data from the 1,501 HTML files and combined it with the date and time stamp and the decoded file name to output to a results database with fields equivalent to the other data recorded.
The ETS Foundation provided the GPS receiver required for those beacons that utilize an external GPS source, and this served as the standard reference beacon as well. This was a Garmin model eTrex Legend (WAAS enabled) which was selected because 1) it is a WASS-enabled mid-range member of the most popular moderate-priced portable handheld GPS line sold in the U.S.; 2) it is the model GPS used as reference for the Key West Test; and 3) because the manufacturer of the beacons relying upon an external GPS, ACR Electronics, at various times has offered units from this line of handheld GPS as a package with their beacons, the ACR GyPSI 406 PLB and ACR SatFind 406 EPIRB. In addition, for the inland terrestrial testing we had Garmin GPSmap 165, Garmin 12 and Garmin V GPS receivers.
To record the number of satellites being received by the GPS and their signal strength, we used a waterproof Pentax OPTIO 33WR digital camera to photograph the GPS display. The waterproof camera could be safely taken on board the life raft during those maritime scenarios, without risk of damage. The camera also saved in the individual image metadata files the date and time the image was taken. While the camera has the capability to display the date and time stamp in the image itself, it was decided not to display this data due to the possibility that it might obscure critical data in the image. A waterproof Olympus Stylus 300 digital camera was available as back-up.
For the terrestrial testing, we also had an ETS volunteer who hooked up a laptop computer to a Garmin eTrex Legend GPS using the NMEA serial output and recorded a bitmap image of the display using G7ToWin software from Ron Henderson with coded file names providing scenario, manufacturer, and model of the beacon.
A candid digital photographic and digital video record of all beacon tests, in the lab and in the field and including preparations involving the beacons, was made for documentary purposes.
Test results recorded locally during the test were supplemented by beacon message data provided by NOAA via the New Zealand GEOLUT pointed at GOES West satellite and via various U.S. LEOLUTs for the LEO satellite data. This supplementary GEOLUT data was primarily used to provide confirmation of locally recorded data, and to confirm acquisition of the data by the satellite. LEOLUT data was used for determining performance of beacons in those scenarios where integrated system performance relying upon Doppler location in unconventional operating conditions was the primary purpose of the test. Dubner decoded the GEOLUT and LEOLUT data received from NOAA and incorporated it into the results database.
Iridium Satellite, LLC donated the use of an Iridium satellite phone and free airtime so that communications could be maintained when out of range of cellular phone service, critical to maintain communications with NOAA in case of COSPAS-SARSAT system anomalies. While a 406 MHz emergency beacon is the ultimate alerting device for survival in an emergency, the Iridium phone is an example of a complimentary technology that can be extremely useful when available as it provides two-way communications. We used it numerous times during the test when communications would otherwise have been impossible. For use onboard Willow we kept the Iridium phone in a waterpoof AqauPac pouch so in case it somehow was dropped overboard it would not be lost or damaged as it is not inherently waterproof, nor would it float.
![]() COSPAS-SARSAT is an international, humanitarian satellite-based distress alerting system that is credited with helping to save over 16,000 lives worldwide and over 4,600 lives in the U.S. since its inception in 1982 (totals as of January 1, 2004).
COSPAS-SARSAT is an international, humanitarian satellite-based distress alerting system that is credited with helping to save over 16,000 lives worldwide and over 4,600 lives in the U.S. since its inception in 1982 (totals as of January 1, 2004).
SARSAT is an acronym for Search and Rescue Satellite-Aided Tracking. COSPAS is an acronym for the Russian words "Cosmicheskaya Sistyema Poiska Avariynich Sudov," which mean "Space System for the Search of Vessels in Distress," indicative of the maritime origins of this distress alerting system.
The system, which operates 24 hours a day, 365 days a year, detects and locates transmissions from emergency beacons carried by ships, aircraft, and individuals.
Sponsored by Canada, France, Russia, and the United States, the system aims to reduce the time required to alert rescue authorities whenever a distress situation occurs. The rapid detection and location of a downed aircraft, a ship, or an individual in distress are of paramount importance to survivors and to rescue personnel. Time is often the enemy in a survival situation and the sooner a rescue is effected, the more likely the successful outcome.
The COSPAS-SARSAT system consists of emergency radio beacons (distress beacons), equipment on satellites in low-earth polar and in geosynchronous orbits, ground receiving stations also called Local User Terminals (LUTs), Mission Control Centers (MCCs), and Rescue Coordination Centers (RCCs).
There are three types of emergency beacons: 1) Emergency Position Indicating Radio Beacons (EPIRBs) for maritime applications, 2) Emergency Locator Transmitters (ELTs) for aviation applications, and 3) Personal Locator Beacons (PLBs) for individuals in distress. Emergency beacons transmit on 121.5, 243 (military) and 406 MHz. Satellite notification of 121.5 and 243 MHz alerts are being phased out, with termination scheduled by February 1, 2009. 406 MHz has become the international standard, providing far better accuracy and fewer false alerts.
 Beacons that transmit on 406 MHz send digitally encoded information that includes a beacon I.D. for accessing a user registration database. This database can supply the beacon type, its country of origin, the registration number of the maritime vessel or aircraft, name of the beacon owner, emergency contact phone numbers, and other data useful to prosecution of the search and rescue.
Beacons that transmit on 406 MHz send digitally encoded information that includes a beacon I.D. for accessing a user registration database. This database can supply the beacon type, its country of origin, the registration number of the maritime vessel or aircraft, name of the beacon owner, emergency contact phone numbers, and other data useful to prosecution of the search and rescue.
This digital data can also include location data derived from the Global Positioning System (GPS). Encoded location is of great value when using a geostationary (GEO) satellite for relaying beacon signals because a GEO satellite provides virtually immediate alerting, typically within 3 to 5 minutes. The addition of location data from the beacon itself provides virtually immediate location information and even greater accuracy.
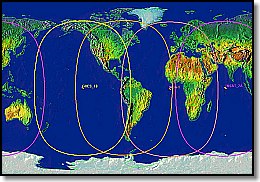
The system uses two different types of satellites: polar-orbiting satellites in low-Earth orbit (LEO) and GEO satellites in geosynchronous orbit. Russia and the United States provide the LEO satellite platforms. Canada, France, Russia, and the United States contribute components. The Russian NADEZHDA navigation satellites carry the COSPAS repeater packages, and NOAA weather satellites carry Sarsat packages. The LEO satellites are in polar orbits. U.S. Sarsat satellites orbit every 100 minutes inclined 99 degrees from the equator at an altitude of 528 miles (850 kilometers). Russian COSPAS orbits every 105 minutes at an altitude of 620 miles (1,000 kilometers) and an orbital inclination of 83 degrees. There is up to a 1.5 hour delay before a LEO satellite passes over a beacon site and receives its transmission. The delay is longest at the equator and shortest at the poles. Within the continental U.S., the maximum delay is approximately 1 hour.
 GEO satellites maintain a stationary position over the Earth's equator at an altitude of 22,300 miles (35,786 km), and continually view large areas of the Earth from approximately 70 degrees North to 70 degrees South latitudes; it can provide near-immediate alerting and identification of 406 MHz beacons if the beacon is successful in transmitting to the GEO satellite. With increasing latitude, the angle up from the horizon that the satellite is visible to the beacon decreases, with a complementary increase in the likelihood the signal will be blocked by terrain or other impenetrable impediments to the line-of-sight signal. There are four GEO satellites; two are operated by the United States and one each by India and the European Union.
GEO satellites maintain a stationary position over the Earth's equator at an altitude of 22,300 miles (35,786 km), and continually view large areas of the Earth from approximately 70 degrees North to 70 degrees South latitudes; it can provide near-immediate alerting and identification of 406 MHz beacons if the beacon is successful in transmitting to the GEO satellite. With increasing latitude, the angle up from the horizon that the satellite is visible to the beacon decreases, with a complementary increase in the likelihood the signal will be blocked by terrain or other impenetrable impediments to the line-of-sight signal. There are four GEO satellites; two are operated by the United States and one each by India and the European Union.
The COSPAS-SARSAT LEO system uses two modes of operation. In the Bent-Pipe or repeater mode, the Search and Rescue Repeater, or SARR, immediately retransmits received beacon signals to any LUT in the satellite's footprint. This mode is possible when the spacecraft is visible to both the beacon and the ground station simultaneously, an area approximately 2,500 miles (4,000 km) in diameter. This footprint is constantly moving as the satellite orbits the earth. Large portions of the globe, particularly of the southern hemisphere oceans, are not within sight of a LUT and consequently 121.5 beacons are not at all effective in those areas. Most populated areas are covered with the exception of the southern half of the African continent.
In the store and forward mode, the on-board Search and Rescue Processor, or SARP, receives and records search and rescue beacon transmissions from 406 MHz beacons only, and repeatedly retransmits them to LUTs as the satellite orbits the Earth. This provides true global coverage.
![]() The signals received by LEO satellites are relayed to a network of LUTs that locate the beacon by measuring the Doppler shift caused by the motion of the satellite with respect to the beacon. This process can locate beacons within an accuracy of approximately 12.4 miles (20 km) for 121.5 MHz beacons and an accuracy of approximately 1.2 to 3 miles (2 to 5 km) for 406 MHz beacons with 1.5 miles (2.5 km) being the average in actual experience for 406 MHz. A low-power 121.5 MHz signal included in all U.S. 406 MHz beacons can assist rescuers to home in on the distress beacon. Beacons that provide a GPS-derived location are touted as being accurate within approximately 328 feet (100 meters). In reality, the actual accuracy can be somewhat worse, though in a worse case it is still orders of magnitude better than without GPS. GEO satellites communicate via a separate network of GEOLUT ground stations around the world.
The signals received by LEO satellites are relayed to a network of LUTs that locate the beacon by measuring the Doppler shift caused by the motion of the satellite with respect to the beacon. This process can locate beacons within an accuracy of approximately 12.4 miles (20 km) for 121.5 MHz beacons and an accuracy of approximately 1.2 to 3 miles (2 to 5 km) for 406 MHz beacons with 1.5 miles (2.5 km) being the average in actual experience for 406 MHz. A low-power 121.5 MHz signal included in all U.S. 406 MHz beacons can assist rescuers to home in on the distress beacon. Beacons that provide a GPS-derived location are touted as being accurate within approximately 328 feet (100 meters). In reality, the actual accuracy can be somewhat worse, though in a worse case it is still orders of magnitude better than without GPS. GEO satellites communicate via a separate network of GEOLUT ground stations around the world.
The location data, no matter from what satellite source, is then relayed to an MCC that alerts the appropriate RCC or an MCC in another country. If the alert is in an area covered by a foreign MCC, that MCC is alerted, and in turn, notifies its own RCC. The RCC then begins the actual search and rescue operation.
NOAA (U.S. Department of Commerce's National Oceanic & Atmospheric Administration), the U.S. Coast Guard, and the U.S. Air Force operate the COSPAS-SARSAT system in the United States.
More information may be found at:
NOAA Web site: http://www.sarsat.noaa.gov
NASA Web site: http://poes.gsfc.nasa.gov/sar/sar.htm
COSPAS-SARSAT Web site: http://www.cospas-sarsat.org (includes COSPAS-SARSAT type approval standards and other standards and documentation)
There are two primary components to a satellite-based distress alert. The first is the alert itself, a notification that persons are in distress. The second is the location of those in distress. Both elements must be present in order to effect a rescue.
With the COSPAS-SARSAT system, GEO satellites offer the potential for near-instantaneous alerting over a large portion of the globe representing the vast majority of human occupation and travel, between 70 degrees North and South latitudes.
If the MCC can speak to the emergency contact(s) obtained from the beacon registration database, assuming the beacon has been properly registered, and that contact can provide general or specific location information, then search and rescue operations can commence and a SAR mission may actually be launched. The registration information combined with the GEO satellite alert have led to a greatly reduced response time in a large number of cases, and even lives saved as a direct result of a GEO satellite alert, based on information received from the points of contacts on the registration form. Often, however, it is necessary to wait until a Doppler location is provided via a LEO satellite pass, a delay that can amount to over an hour. In some emergency situations, an hour's delay could prove fatal.
With a self-locating beacon that transmits its location, this location is provided in the initial alert via the GEO satellite and rescue operations can commence very nearly immediately, potentially significantly shortening the time until rescue and increasing the likelihood of a successful rescue. Moreover, the location information transmitted by a self-locating beacon is derived from GPS and is potentially much more accurate than the location derived via Doppler, approximately 300 feet +/- vs. an average of 1.5 miles in actual experience (ranging from 2-5 km in theory), potentially further improving response time.
All other things being equal, a self-locating beacon theoretically provides an improved chance for a successful rescue than a beacon without self-location. What is not well-documented is how critical this has proven in actual emergencies, and what increased use of self-locating beacons would do to the success rate overall. There is much more that goes into the equation than simply alert time, actual response time can vary significantly such that it can partially negate any advantage. For an organization such as the U.S. Coast Guard whose aerial response can be launched in 25 minutes, typical for a "ready" helicopter, minutes can make a big difference. For other search and rescue services where launching any response can take hours, at best, the relative importance of 30 to 60 minutes' advantage over a conventional Doppler location is diminished, although the accuracy issue remains.
There are also potentially commensurate reductions in costs to Search and Rescue organizations prosecuting the rescue, and a theoretical lower risk to SAR personnel involved due to less time exposed to the inherently risky tasks involved.
 The ability of self-locating beacons to shorten rescue times is tempered by the fact that they derive their location information from a GPS receiver that is itself subject to a variety of limitations. This report shall cover these issues in enough detail to provide a basis for understanding the evaluation results and to allow a reader some perspective from which to judge the evaluation protocols and the results. The technical issues are significantly involved that readers are encouraged to gain additional knowledge of GPS operations and technology via other sources. It is assumed that the reader has at least a cursory understanding of GPS navigation.
The ability of self-locating beacons to shorten rescue times is tempered by the fact that they derive their location information from a GPS receiver that is itself subject to a variety of limitations. This report shall cover these issues in enough detail to provide a basis for understanding the evaluation results and to allow a reader some perspective from which to judge the evaluation protocols and the results. The technical issues are significantly involved that readers are encouraged to gain additional knowledge of GPS operations and technology via other sources. It is assumed that the reader has at least a cursory understanding of GPS navigation.
Whether the GPS receiver is a chip and antenna integrated within the body of the beacon or is a separate GPS receiver connected to the beacon (external), the effectiveness of the receiver in deriving a location is determined by a combination of factors.
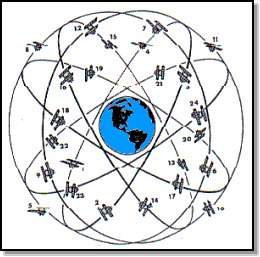
All contemporary GPS receivers are "parallel 12-channel" designs that have the capability to separately receive and integrate signals from up to 12 GPS satellites at once. Generally, the more satellites received, the more accurate the location provided. Typically, 12 satellites are in view at any one time from sea level locations, but, only 6-8 typically have a sufficiently strong signal for the receiver to lock on to the signal and make use of it. However, we have seen up to 11 satellites locked on in some instances in this evaluation.
 A GPS receiver must be locked on to the signal of at least three satellites to calculate a 2D position (latitude and longitude). GPS satellites transmit two low power radio signals, designated L1 and L2. Civilian GPS uses the L1 frequency of 1575.42 MHz in the UHF band. The signals travel by line of sight and cannot pass around objects too dense to allow the signal to penetrate through. The signal will pass through clouds, glass, and plastic but will not go through most solid objects such as buildings and mountains or more than a thin layer of water.
A GPS receiver must be locked on to the signal of at least three satellites to calculate a 2D position (latitude and longitude). GPS satellites transmit two low power radio signals, designated L1 and L2. Civilian GPS uses the L1 frequency of 1575.42 MHz in the UHF band. The signals travel by line of sight and cannot pass around objects too dense to allow the signal to penetrate through. The signal will pass through clouds, glass, and plastic but will not go through most solid objects such as buildings and mountains or more than a thin layer of water.
A GPS signal contains three different bits of information; a pseudorandom code, ephemeris data, and almanac data. The pseudorandom code is simply an I.D. code that identifies which satellite is transmitting information and is not important for location purposes. Ephemeris data, which is constantly transmitted by each satellite, contains information about the status of the satellite (healthy or unhealthy), current date, and time. This part of the signal is essential for determining a position. The almanac data tells the GPS receiver where each GPS satellite should be at any time throughout the day. Each satellite transmits almanac data showing the orbital information for that satellite and for every other satellite in the system. This is useful for many purposes, but not essential to gain a location.
The ability of the receiver to receive GPS satellite transmissions is determined in part by the sensitivity of the antenna. Some antennas are better than others and this is an area where considerable progress has been made in recent years, both in miniaturizing the antenna and in improving its sensitivity. All other things being equal, smaller antennas will generally not perform as well as a larger antenna using the same level of technology, but with the rapid advance of antenna technology, size alone is not a reliable factor in determining performance. GPS antennas integrated within a beacon or handheld GPS are available in a variety of technologies, but package formats are limited to a flat plate or a stub mast. There is no independent documentation to suggest that either format is necessarily superior, too much depends on other technological issues. Suffice to say, the best GPS chip in the world will be handicapped if the antenna is compromised.
When a GPS receiver is integrated into a beacon, there is another issue that comes into play and can have a potentially detrimental affect on GPS performance, one that an independent receiver may not be affected by.
A GPS-equipped beacon contains all of the usual beacon electronics in very close proximity to the GPS receiver and antenna. Most electronics generate unintentional RF radiation or "radio-frequency noise." This noise can interfere with the operation of an internal GPS receiver. Similar behavior can be observed in broadcast radio receivers placed next to computers (especially AM radios).
More critically, all of these beacons transmit a 121.5 MHz homing frequency that allows rescuers to use direction-finding equipment to home in on the beacon once they have arrived in the general area, particularly important when there is no GPS location provided or the survivors have moved or have been moved from the originally transmitted position. The GPS satellite transmission frequency (1575.42 MHz) is very nearly the 13th harmonic (or multiple) of 121.5 MHz. As such, some of the radio energy generated by creating and transmitting the 121.5 MHz homing signal can interfere with receiving the GPS signal. The GPS signal is very weak—so weak in fact that a mathematical trick known as "coding gain" is required for GPS receivers to even "hear" it. The specified minimum received signal strength of the GPS "Link1" (L1) frequency is -160 dBW (decibels referenced to 1 watt). That is 0.0000000000000001 watts; in scientific notation: 1 x 10-16 watts. The 121.5 MHz signal from the beacon is a minimum of 25 mW up to 100 mW or -10 dBw (a tenth of a watt), 0.1 watts, 1x10-1 watts. So the beacon's 121.5 MHz transmission is potentially 150 dB stronger than the weakest civilian GPS signal. For the non-mathematically inclined, that's one quadrillion times stronger.
However, it's not the beacon primary homing frequency we're (mostly) concerned with--it's the 13th harmonic of that signal, and harmonic energy tends to fall off rapidly. We did not disassemble any of the tested beacons to measure the strength of these harmonic signals. However, there could easily be a few million times (~60 dB) as much beacon energy being transmitted as the GPS signal being received at the same time. Engineers are faced with a difficult design problem to filter out the weak GPS signal from this overwhelmingly stronger transmission virtually on top of or next to the receiving GPS antenna.
The final part of the GPS performance equation is the software. GPS chips generally come preprogrammed with basic software that takes 3 or more satellite signals and generates a location from them. If that's all there was to it, most GPS receivers would be pretty comparable. However, many, if not most, GPS receiver manufacturers tweak the software to one degree or another in order to gain some sort of process improvement or added capabilities. Depending upon how good a job they do, software can make a radical difference in GPS performance, for either better or worse.
ACR has recently made a point of touting its "FastACQ chip," included in the ACR GlobalFix EPIRB, which is marketing terminology referring to their proprietary software that they claim is designed to improve the speed of location acquisition. None of the other beacon manufacturers has acknowledged or made any public disclosure as to whether or not they tweak the GPS software in their integral GPS beacons.
Whether a beacon receives the GPS location information from an external GPS or an integral GPS chip, the longitude and latitude coordinates are included in the digital data stream sent to the satellite.
This location information is updated once every 20 minutes for beacons with internal GPS. If the location is not updated, after four hours the location data is removed from the transmission. Those beacons that rely upon an external GPS do not update GPS information unless the beacon is switched off and then on again, in accordance with COSPAS-SARSAT standards.
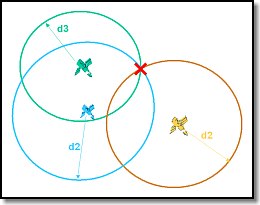 In order for GPS to derive a location, it must receive data from at least three satellites. This will allow it to achieve a 2-D (two dimensional) location providing longitude and latitude. The most common reason for this location to not be acquired under normal circumstances in non-urban areas is that the signal is being blocked by intervening material. As noted, the GPS signal is relatively weak and is blocked relatively easily.
In order for GPS to derive a location, it must receive data from at least three satellites. This will allow it to achieve a 2-D (two dimensional) location providing longitude and latitude. The most common reason for this location to not be acquired under normal circumstances in non-urban areas is that the signal is being blocked by intervening material. As noted, the GPS signal is relatively weak and is blocked relatively easily.
High-density material such as rock, concrete, metal, and the like will prevent GPS signal reception.
Water is a very effective absorber of the GPS radio frequency. This means that the canopy of a tree with branches and leaves containing a high percentage of water can prove to be effective blockers of GPS signals if the foliage is dense and thick enough. So, too, is the human body. A hand held over a GPS receiving antenna will prevent reception of the GPS signal. Persons standing too close will have the same effect, particularly if surrounding the beacon, creating something of a canyon with a very limited view of the sky. The same situation can occur with a beacon at water level, floating or being held, when elevated swells or waves can obscure a significant portion of the sky for critical periods of time, to say nothing of the drenching a beacon may receive from waves, spray, or rain.
Regular users of GPS for navigation, particularly on land where many sources of blockage exist, have learned that they must be cognizant of their surroundings and may have to relocate the GPS receiver or antenna to allow for adequate reception. Under a moderately dense overhead canopy, sometimes even an inch or two of movement will make the difference between acquisition of a location or not.
 Movement of the GPS antenna in combination with the chip and software can also have a detrimental effect on GPS performance with some systems exhibiting lesser capability to lock onto GPS satellite signals while in motion. Particularly in the case of integral GPS EPIRBs floating in the water, extreme motion can be evident due to the effects of water movement and this can be further exacerbated by the "jerking" effect caused by a tethered EPIRB and the vessel to which it is tethered moving in uncomplementary fashion.
Movement of the GPS antenna in combination with the chip and software can also have a detrimental effect on GPS performance with some systems exhibiting lesser capability to lock onto GPS satellite signals while in motion. Particularly in the case of integral GPS EPIRBs floating in the water, extreme motion can be evident due to the effects of water movement and this can be further exacerbated by the "jerking" effect caused by a tethered EPIRB and the vessel to which it is tethered moving in uncomplementary fashion.
As we saw during our tests, the quality of the GPS receiver, as a packaged system of chip, antenna and software, can also significantly affect whether a location is acquired. In numerous instances we were able to acquire a location on some of our GPS receivers and not on others. That this is also an issue, to an even greater degree, with the integral GPS beacons is self-evident from the results.
Due to media coverage of the use of GPS by the military, which is not comparable to civilian GPS use, and the media coverage of which is also not necessarily always factually accurate, unrealistic portrayal of GPS capabilities in movies and TV programs, and day-to-day interface with higher performance GPS units used in boats, automobiles, aircraft and the like that are generally operating under favorable receiving conditions, it seems inevitable that the average consumer with limited or no GPS experience has an unrealistic expectation of what performance they can expect from GPS used with these beacons. This is especially true for the GPS receivers currently used in integral GPS beacons. Some existing advertising for these beacons appears to suggest a level of performance that may not exist, even among the best performing examples. The natural limitations to GPS acquiring a location are not well communicated to consumers who purchase or are looking to purchase a self-locating beacon. The desirability of optimizing conditions for GPS reception when using a self-locating beacon, especially one with integral GPS, is also not well-communicated to the end user.
Users of GPS are used to seeing very accurate resolution from even the most rudimentary of current generation GPS receivers, typically down to a tenth of a second with an estimated accuracy of a few 10s of feet even without WAAS (with WAAS this accuracy improves even further). The GPS chips in these beacons are capable of such resolution, but the GPS location resolution and accuracy provided by these beacons is compromised by the COSPAS-SARSAT protocol specification for the data stream. This is an artifact of the original specifications for the hexadecimal "long" location protocol message that is limited to 30 characters.
The finest resolution available from a beacon transmission is in 4-second increments. At the equator, 1 second of latitude or longitude equals 101.3 feet. The distance in longitude is reduced as you increase latitude since the lines of longitude converge to zero at the poles. By way of example, at the approximately 37 degrees of latitude for the testing conducted in Santa Cruz, 1 second of longitude is equal to 81 feet. At the equator, a beacon transmission defines a square box 405.2 feet on each side. At Santa Cruz, a beacon transmission defines a rectangle 405.2 feet in the North-South direction by 324 feet in the East-West direction.
NOAA and others claim that accuracy is typically within 100 meters-328 feet-for self-locating beacons. It is therefore perfectly reasonable for a beacon right in the middle of one 4-second "box" to report itself as being in either that box or any of the eight adjoining boxes. In the worst case (involving a 100-meter GPS error in precisely the worst possible direction), the beacon will be found 615 feet away from the center of the box reported in the beacon transmission. McMurdo claims "positional accuracy to within typically 30 meters."
McMurdo provided the following explanation that their "beacons determine their exact location based upon the GPS co-ordinates and round this up or down to the nearest 4 second grid co-ordinates in the box corners. Thus the worst case error is for an actual location in the middle of a box that might be reported as any one of the four corners of that box. If we use the numbers in your report for Santa Cruz then the worst case error to the middle of the box is 79 metres (259 feet). As we do not know which "side" of the box this position relates to, this error must be +/- 79 metres. If we now assume that, on average, the error will be half of this, then at Santa Cruz the typical error would be +/- 39.5 metres. In practise (sic) we assumed that typically a higher latitude would apply and thus used a smaller longitude box, thus we believe that "typically +/- 30 metres" is still a valid statement."
The Foundation believes that McMurdo's assumptions are flawed and thus the statement misleading.
McMurdo takes the position that half the time the beacon would be found within 30 meters of the reported position. In order to make that statement, McMurdo has to make certain assumptions, assumptions that we think are not necessarily valid.
First, McMurdo apparently assumes that the beacon is at a specific location that is further north than the approximately 37 degrees at Santa Cruz. Regardless of what location they assume, we reject this assumption as entirely valid for a product that is sold for use in any geographic region of the world, excepting any disclosure of this assumption to the consumer, which McMurdo does not make.
Moreover, even at the North or South Poles, the worst case (assuming millimeter precision GPS accuracy) is approximately 62 meters, and half the worst case is approximately 31 meters, which is still greater than 30 meters at the highest possible latitude.
McMurdo also assumes that the GPS system error is extremely small, which is not necessarily a valid assumption. McMurdo also assumes that the beacon was activated near the center of a "box," which is not a valid or reasonable assumption at all.
Some significant percentage of the time, the GPS error of a beacon placed randomly in the box will overlap the side of a box, and that beacon can be expected to report itself as being in either of the two boxes. Likewise, the GPS error of a beacon will sometimes overlap a corner, and the reported position might be in any of four boxes.
If the beacon is in the box that it reports itself in, the average error will be about 40 meters. However, McMurdo is ignoring the very real likelihood that the beacon is in an adjacent box.
This evaluation tested both EPIRBs and PLBs. Both transmit a 5 Watt digital burst of approximately 0.5 seconds duration approximately every 50 seconds. This period is randomly distributed between 47.5 to 52.5 seconds to prevent multiple beacon transmissions from interfering with each other. Both transmit an equivalent digital message. However, there are notable differences between the two types of beacons. EPIRBs are meant to be carried on and deployed from a marine vessel; PLBs are meant to be carried by a person and deployed by an individual in distress. EPIRBs are intended to be used only in a marine environment; PLBs may be used on land or in a marine environment, but are only tested during certification in a land environment. As such, with the exception of the baseline tests, EPIRBs were tested only in the marine environment.
EPIRBs come in both automatically deployed or manually deployed models. Category I EPIRBs are activated either manually or automatically. Category I EPIRBs are housed in a bracket equipped with a hydrostatic release that releases the EPIRB when the vessel sinks. The EPIRB is activated when released and floats to the surface. An EPIRB thus released will float free unless retrieved by survivors in the water or in a survival craft. Category II EPIRBs are manual activation only units. Both categories of EPIRBs are designed to activate when they are immersed in water, regardless of the position of the manual switch.
EPIRBs must float with the antenna deployed and out of the water in the normal transmitting position. U.S. regulation requires that they be equipped with a strobe light that activates automatically when the beacon is switched on. All have a means to tether the EPIRB to a vessel or survival craft so they will float free while secured to the survival craft. They must operate for at least 48 hours at either -40�C to +55�C (Class 1) or -20�C to +55�C (Class 2). COSPAS-SARSAT standards assume that the body of water in which the EPIRB is floating will serve as the ground plane for the antenna.
PLBs are generally smaller because they require smaller batteries, being required to operate for only 24 hours at either -40�C to +55�C (Class 1) or -20�C to +55�C (Class 2). They are not required to be equipped with a strobe light. All are currently equipped with a tether of some sort, although this may just be a wrist tether. Category 1 PLBs must be buoyant; Category 2 PLBs are not buoyant. Category 1 PLBs are not required to float in a transmitting position—they simply are required not to sink, the objective being solely to help prevent loss if dropped into the water. Howevr, they are not precluded from floating in a transmitting position. PLBs are manually activated only.
It has been noted that in real survival situations many EPIRBs are retrieved from the water after automatic release and activation or are retrieved from the vessel by survivors when they abandon ship into a life raft. In either case the EPIRB is then retained inside the life raft, rather than being floated in the water on the end of their very thin tether line, as designed. In some cases this appears to be the result of ignorance as to how to deploy the EPIRB as designed. In other situations, it appears that as their primary hope for rescue, survivors do not appear to be willing to trust their life to that thin tether, particularly in severe conditions. In a number of documented cases, the tether line was not securely tied off to the life raft and was separated from the life raft. Since they will tend to drift at different rates, they can quickly become separated. At least one life raft manufacturer, in recognition of this, provides an option for a secure pocket in the life raft to hold the EPIRB. (NOTE: Some aviation life rafts come equipped with an ELT (aviation version of an emergency beacon) that is secured semi-permanently in the raft, and some also activate the ELT automatically upon deployment of the raft.) In recognition of this reality, we tested EPIRBs both floating tethered to a vessel and retained inside a life raft.
PLBs were tested on land, held by persons floating in the water (or simulation of same) and in the life raft.
The location protocol beacons tested obtain their GPS location via two dissimilar means that offer various advantages and disadvantages. The operation of beacons using an external GPS source and those with an internal, or integral, GPS receiver are markedly different and not always directly comparable.
Beacons using an external GPS source have generally been less expensive than those with an internal GPS receiver. Especially for a consumer who already owns a GPS receiver and for one who uses a GPS for navigation purposes, this can result in a more economical total purchase cost with similar distress signaling benefits.
Having an external GPS source requires that the owner/operator connect the GPS to the beacon. All current beacons require a physical connection. The ACR external GPS beacons evaluated come with a proprietary infrared adapter that terminates in two bare wires. This adapter provides a waterproof connection to the beacon as there is no physical connection between the interior and exterior of the beacon case, but the wires must be connected to an adapter to fit the external GPS.
On some units by other manufacturers that were not evaluated, the adapter is not included and must be purchased. On some units the connection is a plug and receptacle that may not be waterproof, not via an infrared connector.
There is no universal standard for the GPS data output connector used for this purpose; sometimes not even within a GPS manufacturer's product line. As a result, the owner must acquire a GPS adapter from the manufacturer or elsewhere and either assemble their own interface cord or have one manufactured for them using the beacon's adapter. In most cases, the GPS adapter is not waterproof or submersible, although most appear to be very water-resistant. The interface cord for our evaluation was provided by the ACR Electronics representative attending the evaluation who had personally assembled it.
External GPS receivers have the potential, at least when compared to the current generation of GPS enhanced beacons, of being more capable of acquiring a location under difficult conditions. This can be attributed to a combination of any or all of better receiver, software, and antenna.
EPIRBs using an external GPS source in most marine installations use the boat's own generally very capable high-performance GPS receiver that is permanently connected to the EPIRB held in its storage bracket. In such installations the GPS is generally equipped with a high-performance external GPS antenna that provides much-improved reception compared to the internal antennas on a handheld GPS receiver or within an integral GPS beacon. In such an installation, the EPIRB is constantly being updated with the latest GPS location and would be expected to have received a GPS location from the GPS prior to being activated and deployed. This would not be the case for an EPIRB in an abandon-ship bag or in a life raft survival equipment pack.
In situations where a user of a beacon, typically a PLB in this case, is going to be entering an area or circumstances where they know that it is unlikely that a GPS location can be acquired, an area with heavy overhead canopy, a narrow canyon, or where they might fall into a crevasse, for example, they can load a location into the beacon beforehand, possibly providing a nearby location for SAR to work with and the attendant advantages when they might otherwise not be able to do so. Note, that while the beacons tested retain this location in memory forever or until the beacon is activated and then deactivated again, the COSPAS-SARSAT standard has been changed since they were originally approved and any recently approved model beacons discard the location after four hours.
A beacon and an external GPS generally represent a bulkier and weightier package than a single integrated device. With an external GPS beacon, the user must contend with two devices and a connecting cord, at least with existing beacon and GPS interfaces. Deployment and activation can be more difficult when having to handle multiple devices. The survivor must know how to switch on and properly orient the GPS for satellite reception. In a situation where the owner or normal operator of the beacon is incapacitated or unavailable, and the person operating the distress signaling gear is not familiar with the gear, these issues can become a bigger liability.
Beacons using external GPS do not update their position unless manually switched off and on again while a GPS is still connected. Typically, the user isn't aware of this as an option as it is usually only explained in the operator's manual. Experience suggests that many owners do not read the operator's manual or review it only cursorily. This is not a disadvantage for inland use where survivors will typically remain in the same location until rescue, or at least until contact is made with SAR. It is a potential deficiency in marine use, but as noted in the following discussion of integrated GPS beacon advantages, this is of practical use in only a very limited number of SAR scenarios.
The primary advantage of an integral GPS beacon is in the packaging—everything is self-contained. This is an advantage especially for PLBs where size and weight typically are major considerations.
Another advantage is that there is no need for a user to be familiar with the operation of the GPS receiver, or how to connect the two devices together. Simply activating the beacon also activates the GPS. In general, operation of the beacon is easy and self-evident to a degree, although most beacons examined by the authors do not do a very good job of instructing the user in optimum operation with regards gaining a GPS location.
Beacons with integral GPS are allowed to update their position every 20 minutes, though this isn't a requirement. This is of little advantage for inland use, but it is a potential advantage in maritime use in a minority of survival circumstances.
The value of the ability to update location under current search and rescue protocols used in the U.S. SAR community is limited, even in the maritime environment where movement due to wind, current, and waves is the norm. Current protocol is to provide the initial location to SAR forces who launch on that information. In the vast majority of circumstances in response to a GPS-enabled 406 MHz alert, SAR resources will arrive on scene within an hour or two. Unless a new location is significantly distant from the original, they will not be provided with it enroute. Typically, they find the survivor(s) within viewing distance of the original location as drift is generally slow enough that they will not have moved a significant distance in the interval, or SAR on scene can quickly determine the direction and speed of drift and can thereby locate the survivor(s).
If the survivor(s) is a person in the water in a PFD, rather than an easier-to-detect vessel or life raft, then the probability of detection is much lower and the value of updated location information becomes greater. If the SAR resource that first arrives on the scene does not promptly locate the survivors, they may contact their operations control and should receive an updated position at that time. Movement due to drift is more significant an issue in blue water conditions far from land, where the time to arrive on scene may be measured in hours or even days. Extreme conditions can also increase the rate of drift to a sometimes surprising degree. In such instances, updated location has the potential to be much more valuable.
It is also expected that the on-scene SAR resource will use their 121.5 MHz homing capability to locate the survivors upon arrival, if necessary. In some instances crews do not even turn on direction-finding equipment unless they fail to locate survivor(s) initially. The instances when this tool is useful with 406 MHz location protocol alerts are relatively few because the overall location accuracy is so good. However, in those cases where it is needed, there are a number of potential problems with this strategy, not the least of which being both the poor overall performance of 121.5 homing in some conditions, and the poor performance of some aircrews in use of existing direction-finding equipment to quickly locate 121.5 MHz transmission sources.
It is expected that the increased utilization of self-locating beacons will engender a change in strategy to provide enroute updates more readily and resultant potential for improved rescue response times in such scenarios. In addition, new direction-finding equipment has been introduced that directly receives and translates the location data, and provides improved directional guidance using the more robust 406 MHz data burst, which will provide on-scene communication directly from the beacon to SAR resources. This improved capability is just beginning to be put into service, but will eventually make its way into the majority of the SAR fleet. Once available, it will likely become a primary location tool as SAR resources approach the scene.
Integral GPS beacons are generally more expensive than those relying upon an external GPS. In many situations the ability of the internal GPS to acquire a location under poor reception conditions, at least that we have seen in current generation beacons, may not be as good as that available from a high quality external GPS. With packaging limitations, that may be the situation for some time to come, but it should not be considered inherently so.
Operation of the GPS receiver is a significant drain on the battery, as users of handheld GPS units have often discovered to their dismay when they have no spare batteries available. Manufacturers have developed proprietary operating schemes that minimize the operation of the GPS receiver, while at the same time theoretically providing adequate time to acquire a location. This is an effort to limit battery consumption, and thereby the size of the battery, which is a prime component that determines the overall size of the beacon, and to a lesser degree, the cost.
As COSPAS-SARSAT specifications allow the transmitted location to be updated no less than every 20 minutes, there is no need to operate the GPS continuously. Between operating periods, the GPS receiver is put into "sleep" mode to conserve power, waking up to check for location and, if necessary, update the location, every 20 minutes in the models tested. The initial operating period of the GPS receiver may be longer than subsequent periods, although not necessarily so, to allow additional time to acquire and download the ephemeris data and almanac.
Some industry observers have suggested that the difficulty some integral GPS beacons may have in acquiring a location could be related to an initial operating period that is too short. In the Key West Test report's summary (see Appendix 1), one suggestion is that "beacons be designed to try to acquire GPS locations for time periods of at least [15] minutes." The ACR beacon already complies with this suggestion. The Techtest beacon initially attempts to acquire for a total of four 5-minute periods alternating with 5-minute sleep periods. McMurdo has an initial period of 5 minutes duration. There is no way to determine solely by independent observation if the length of the initial GPS operational period is a contributor to any integral GPS beacon's location performance deficit in this evaluation.
A good argument can be made that the ideal self-locating beacon would offer both the option of using an external GPS when that is advantageous and would also have an internal GPS for situations when that is an advantage. Shortly after the completion of these field tests ACR Electronics announced the upcoming availability of a PLB that offers this capability.
You can also download the manufacturers' sales materials for the 406 MHz self-locating beacons that were tested: Manufacturers' Sales Materials and Brochures for Beacons Tested (4 MB PDF download)
Additonal information on Equipped To Survive™ related to this Evaluation:
|
| SELECT AND USE OUTDOORS AND SURVIVAL EQUIPMENT, SUPPLIES AND TECHNIQUES AT YOUR OWN RISK. Please review the full WARNING & DISCLAIMER about information on this site. |
Executive Director: Doug Ritter
Email: Doug Ritter
URL:
http://www.equipped.org/406_beacon_test_background.htm
First Published: April 19, 2004
![]()
Email to: [email protected]
|